
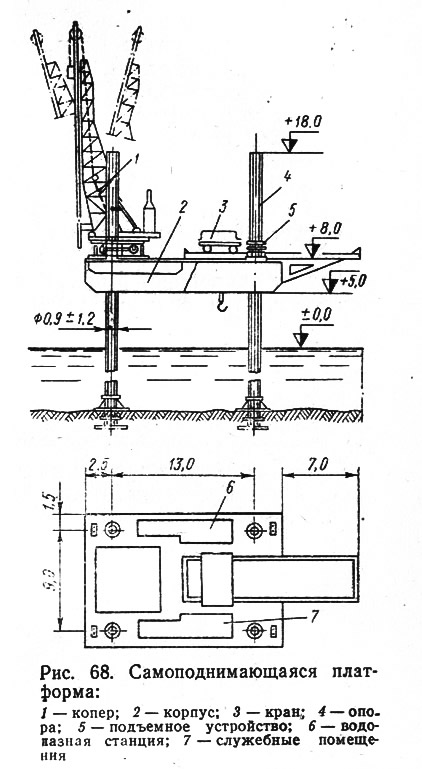
Оригинальной конструкцией для возведения гидротехнических сооружений на открытых побережьях и на незащищенных от интенсивного волнения акваториях, практически вне зависимости от ветра, течений и колебаний уровней воды, являются плавучие установки с самоподнимающимися платформами (рис. 68).
Самоподнимающиеся плавучие платформы можно использовать в качестве технологического оборудования для строительно-монтажных работ в условиях морского и речного гидротехнического строительства, а также в качестве постоянных частей возводимых сооружений или основной конструкции причалов (см. п. 54).
Известно применение самоподнимающихся платформ на континентальном шельфе морей и океанов при глубине воды до 100 м. В гидротехническом строительстве платформы наиболее эффективны на глубине 3—50 м при скорости подъема 3—10 м/ч.
В мировой практике самоподнимающиеся платформы типа «Де-Лонг» успешно применяли при строительстве и монтаже глубоководных нефтяных терминалов, пирсов для руды, сепарационных платформ для нефти и газа, обычных пирсов и портовых сооружений, сухих доков, навигационных сооружений, подводных выемок и дноуглублений, подводных трубопроводов и канализационных выпусков, нефтяных буровых платформ, мостов, туннелей и других сооружений.
Плавучая самоподнимающаяся платформа состоит из металлического корпуса понтонного типа, обеспечивающего плавучесть платформы при транспортировке и стоянке на воде, и опор в виде колонн сплошной или решетчатой конструкции. При буксировке по воде к месту работы или установке в конструкцию сооружения опоры таких платформ подняты вверх, во избежание тормозящего действия. Платформы можно также предварительно демонтировать и уложить в транспортном положении по верху понтона.
После того как платформа доставлена к месту установки, опоры при помощи системы домкратов опускают до упора в грунт дна акватории. Затем теми же домкратами корпус платформы (понтон) поднимают на нужную высоту над уровнем моря для выполнения необходимого комплекса строительно-монтажных работ либо для фиксации понтона, определяющей его постоянную работу в сооружении. Если опоры находились в транспортном положении, то их при помощи плавучего крана или’ крана, находящегося на платформе, вставляют в отверстия понтона и повторяют описанную операцию.
Все существующие типы само-поднимающихся платформ, несущих на себе различное оборудование для строительно-монтажных работ, в принципе состоят из следующих основных частей: корпуса-понтона, обеспечивающего плавучесть установки, на палубе которого в трюме и иногда на выносных консолях размещаются комплекс машин, механизмов и оборудования, все необходимые системы и устройства,, вертолетная площадка и помещения для обслуживающего персонала; опор-колонн сплошной (обычно трубчатой) или решетчатой конструкции (в количестве 3—16 и более); подъемных устройств различных систем и разного вида действия.
Во время транспортировки на установку могут быть погружены оборудование, механизмы и материалы непосредственно к работе не относящиеся, но могущие понадобиться в дальнейшем. Корпус платформы в виде параллелепипеда обычно имеет подрез в носовой части понтона для удобства всхожести на волну. Он может иметь и другую конфигурацию в плане в зависимости от назначения — П-, Г- и О-образную.
Самоподъемная плавучая установка «Бакы», построенная из отечественных материалов и полностью укомплектованная оборудованием отечественного производства, имеет корпус понтонного типа расчетных размеров 57,6X47,4 м при высоте борта 7,25 м и осадке при бункеровке 4,5 м. Ее корпус в основном выполнен из малоуглеродистой стали, а для наиболее напряженных конструкций при толщине более 12 мм применена низколегированная сталь. Корпус изготовлен на стапелях в виде трех отдельных понтонов, состыкованных на плаву после спуска. Ширина понтонов позволяла проводить их по внутренним водным путям.
Опорные колонны самоподнимающихся установок выполняют в основном двух конструктивных вариантов: решетчатые трех- или четырехугольного сечения для уменьшения на них волнового давления; сплошные пустотелые цилиндрические.
Опоры размещают в находящихся в понтоне отверстиях вертикально, но при больших глубинах воды их устраивают наклонными для увеличения устойчивости установки и уменьшения величины изгибающих моментов в опорах. Этой же цели служат специальные опорные фундаментные башмаки на концах опор, опорная площадь и форма которых зависят от качества грунтов дна. Существует оригинальная конструкция самоподнимающейся платформы «бушн стар» (США) для установки на слабых грунтах, у которой три колонны диаметром 2 м опираются на дно при помощи общей фундаментной плиты размерами 64X52 м.
Па платформах расположены подъемные устройства в виде систем домкратов различной конструкции и принципов действия. Чаще всего употребляются подъемные устройства трех типов — гидравлические, пневматические и механические.
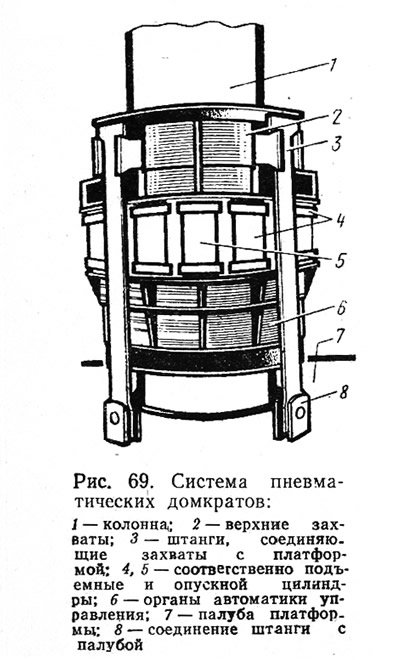
Общий вид системы пневматических подъемных устройств для подъема и опускания платформы, смонтированной вокруг каждой из цилиндрических опор установки, показан на рис. 69. Платформа перемещается относительно опор, установленных на дно, вследствие поочередного движения по каждой цилиндрической опоре двух комплектов захватов, приводимых в движение системой домкратов. Подаваемый от компрессора к домкратам сжатый воздух (для платформы с шестью опорами французской фирмы «Эрсент» под давлением 2,5 МПа) используется для удержания цилиндрических колонн платформы на опорах при помощи резиновых захватов и привода цилиндров подъема и спуска, изменяющих вертикальные расстояния между захватами. При уменьшении давления воздуха в захватах опоры освобождаются.
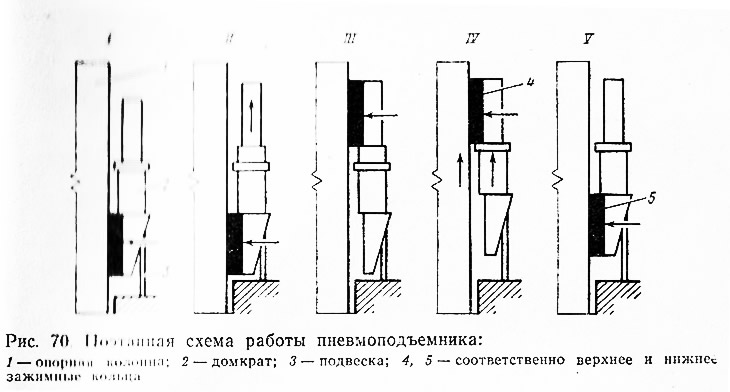
Во время работы в положении I (рис. 70) нижний кольцевой захват охватывает колонну, а из верхнего воздух выпущен, поэтому он не имеет контакта с колонной. В положении II воздух подается в пневматические домкраты, поднимающие верхний зажим и вместе с ним корпус платформы, соединенный с кольцевым зажимом при помощи подвесок. В положении III сжатым воздухом обжимают вокруг колонны верхний кольцевой зажим, а в положении IV колонна освобождается от нижнего зажимного кольца, и двумя домкратами двойного действия (на схеме не показаны) поднимается нижний зажим на ход поршня домкратов. В положении V подается сжатый воздух в нижний зажим, и цикл повторяется.
В современных установках используют пневмодомкраты грузоподъемностью 200—10000 т на каждой опоре с диаметром домкратов 10—40 см и более, располагаемые серией в 6—14 домкратов между захватами по периметру опоры. Они обеспечивают подъем рабочей платформы со скоростью 0,5—6 м/ч при шаге подъема 0,4—1 м.
Для поднятия особенно тяжелых платформ употребляют спаренные на каждой колонне пневматические устройства — тандемы, состоящие из домкратов описанных конструкций.
Распространенным видом подъемного устройства, особенно на платформах с опорами пространственной решетчатой конструкции, является гидравлическое подъемное устройство, состоящее из гидравлических домкратов, механизмов фиксации положения опорных колонн и силового оборудования.
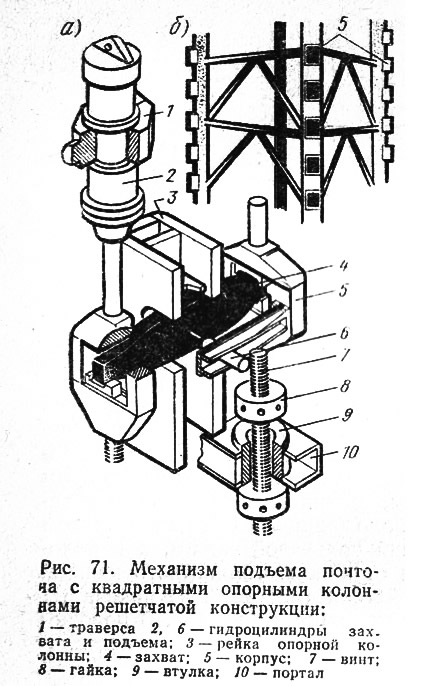
По углам каждой решетчатой колонны квадратного сечения устанавливают по паре силовых гидродомкратов, составляющих в совокупности механизм подъемника колонны (рис. 71, а). Каждая пара гидроцилиндров приводит в движение захват, служащий для зацепления с зубьями реек, расположенных по углам колонны (рис. 71, б). При подъеме или опускании корпуса установки в каждом гидроподъемном механизме попеременно зацепляются с зубьями опорных колонн диагонально расположенные пары захватов. Таким образом, усилие для подъема корпуса создается в каждом механизме четырьмя гидроцилиндрами.
Принцип работы гидроустановки для любого сечения колонн заключается в том, что каждый гидроцилиндр подъемного устройства соединен с верхним и нижним фиксаторами. При подъеме колонны рабочая жидкость подается в нижний фиксатор и его шкворень входит в паз опорной колонны. Затем жидкость направляется в гидроцилиндр подъема, перемещает его поршень вверх, увлекая за собой нижний фиксатор с колонной. При этом передвигается и верхний фиксатор до достижения паза на колонне. В таком положении поршень гидроцилиндра останавливается, рабочая жидкость подается в верхний фиксатор для введения его шкворня в паз опорной колонны. Шкворень нижнего фиксатора выходит из паза, освобождая колонну, а рабочая жидкость вновь поступает в гидроцилиндр, опуская его в исходное положение. При опускании колонн процесс происходит в обратном порядке. Линейное перемещение колонны равно шагу между пазами.
Гидравлические подъемники, оснащенные гидродомкратами грузоподъемностью 300—500 т, обеспечивают скорость подъема 0,3—0,6 м/мин.
Подъемные устройства, основанные на использовании домкратов с механическим принципом действия, не нашли широкого применения для самоподнимающихся платформ.
На самоподнимающихся платформах всех конструкций должны быть обустройства для буксировки установки, якорные и швартовные устройства и приспособления, энергетические установки, помещения для обслуживающего персонала и складирования оборудования, горюче-смазочных материалов, воды, а также располагаемая на выносных консолях вертолетная площадка.
На рабочей платформе размещаются механизмы и оборудование для строительства морских гидротехнических сооружений: подъемные краны с грузоподъемным и грейферным оборудованием, копры, механизмы и приспособления для погружения свай и шпунта, буровое оборудование и оборудование, необходимое для специальных работ, а также монтажные элементы.
Возведение морских гидротехнических сооружений, в частности причальных, с использованием самоподнимающихся платформ вызвало дальнейшую индустриализацию строительства, укрупнение элементов конструкций, уменьшение их числа и типоразмеров, упрощение монтажных операций, а также сокращение сроков работ, практически не зависящих от погодных условий. Все это, в свою очередь, приводит к повышению производительности груда, качества работ и снижению стоимости сооружений.
Самоподнимающиеся платформы буксируют к месту работ буксиром, мощность которого зависит от дальности транспортировки, гидрометеорологических условий, размеров и массы платформы. Скорость буксирования обычно не превышает 4 уз.
Транспортировка платформ представляет собой достаточно сложную и опасную операцию. Платформа в транспортном положении с выдвинутыми вверх на максимальную высоту опорами становится мало остойчивой даже при сравнительно небольшом волнении. Поэтому при дальних рейсах опорные колонны демонтируют и перевозят на палубе платформы. Это увеличивает остойчивость понтона-платформы, но создает дополнительные трудности по вторичной сборке опор в открытом море, особенно при отсутствии достаточного числа необходимых механизмов.
Существуют конструкции «шагающих» платформ, не требующих буксиров. Они состоят из верхней и нижней частей, каждая из которых имеет по четыре трубчатых опоры с опорными башмаками на концах. При движении верхнюю часть платформы, опирающуюся на опоры на дне, поднимают на гидравлических домкратах. Одновременно поднимают нижнюю часть платформы, и ее опоры отрываются от дна. Затем при помощи домкратов выдвигают вперед нижнюю часть платформы и опирают ее на опоры, опущенные на дно. Поднимают опорные стойки верхней части платформы, ее перемещают, и снова опускают стойки на дно.
«Шагающая» платформа «Снойдер 1» была успешно применена при строительстве пирса длиной 185 м, шириной 6 м, на железобетонных преднапряженных сваях в Калифорнии (США).
Весьма эффективно применение самоподнимающихся платформ при строительстве причальных сооружений на открытых, не защищенных от волновых воздействий акваториях. В таких случаях можно вести строительство причалов при высоте волны до 6 м. Примером подобного строительства является сооружение металлического пирса на открытой акватории Цемесской бухты в нефтегавани Шесхарис, проведенное в 1978 г.
Удачно проводятся работы при помощи самоподнимающихся платформ с буровыми установками. Так, при строительстве опорком части эстакады в Западной Сахаре при большом волнении моря и в тяжелых геологических условиях с платформы типа «Де-Лонг» было пробурено около 300 скважин диаметром 2,05 м, в которые были опущены бетонные сваи диаметром 2,5 м.
- Главная
- Промышленные предприятия
- Строительство причалов
- Строительство сооружений с помощью самоподнимающихся платформ
Подразделы
Социальные сети
Похожие статьи
Причальные сооружения из самоподнимающихся платформ
Индустрия: Строительство причалов
Строительство сооружений угольного топливного хозяйства
Индустрия: Тепловые электростанции
Строительство сооружений электрической части
Индустрия: Тепловые электростанции
Строительство сооружений технического водоснабжения
Индустрия: Тепловые электростанции
Строительство причальных сооружений в условиях крайнего севера и на ливных морях
Индустрия: Строительство причалов
Проектирование пневматических сооружений с помощью ЭВМ в режиме диалога «человек-машина»
Здания: Пневматические здания
Жилищное строительство Москвы 30-х годов
История: Современная архитектура
Жилищное строительство Москвы послевоенного десятилетия
История: Современная архитектура
Массовое жилищное строительство Москвы второй половины 50-х годов
История: Современная архитектура
Массовое жилищное строительство в Москве 60-х годов
История: Современная архитектура
Строительство дорог к тепловой электростанции
Индустрия: Тепловые электростанции
Строительство подземной части главного корпуса электростанции
Индустрия: Тепловые электростанции
Строительство надземной части главного корпуса электростанции
Индустрия: Тепловые электростанции
Влияние компоновочных решений главного корпуса на строительство
Индустрия: Тепловые электростанции
Индустрия: Строительство причалов
Строительство сооружений угольного топливного хозяйства
Индустрия: Тепловые электростанции
Строительство сооружений электрической части
Индустрия: Тепловые электростанции
Строительство сооружений технического водоснабжения
Индустрия: Тепловые электростанции
Строительство причальных сооружений в условиях крайнего севера и на ливных морях
Индустрия: Строительство причалов
Проектирование пневматических сооружений с помощью ЭВМ в режиме диалога «человек-машина»
Здания: Пневматические здания
Жилищное строительство Москвы 30-х годов
История: Современная архитектура
Жилищное строительство Москвы послевоенного десятилетия
История: Современная архитектура
Массовое жилищное строительство Москвы второй половины 50-х годов
История: Современная архитектура
Массовое жилищное строительство в Москве 60-х годов
История: Современная архитектура
Строительство дорог к тепловой электростанции
Индустрия: Тепловые электростанции
Строительство подземной части главного корпуса электростанции
Индустрия: Тепловые электростанции
Строительство надземной части главного корпуса электростанции
Индустрия: Тепловые электростанции
Влияние компоновочных решений главного корпуса на строительство
Индустрия: Тепловые электростанции
Строительство сооружений с помощью самоподнимающихся платформ
Статья добавлена в Феврале 2016 года
« Предыдущие статьи
Возведение сооружений способом «стена в грунте»
Кессонные работы при строительстве причалов
Изготовление и погружение опускных колодцев
Погружение свай, свай-оболочек и шпунта
Изготовление и укрупнение сборных железобетонных элементов
Изготовление железобетонных свай и шпунта
Изготовление железобетонных оболочек при строительстве причалов
Изготовление массивов-гигантов при строительстве причалов
Возведение сооружений способом «стена в грунте»
Кессонные работы при строительстве причалов
Изготовление и погружение опускных колодцев
Погружение свай, свай-оболочек и шпунта
Изготовление и укрупнение сборных железобетонных элементов
Изготовление железобетонных свай и шпунта
Изготовление железобетонных оболочек при строительстве причалов
Изготовление массивов-гигантов при строительстве причалов
Следующие статьи »
Причальные сооружения из массивовои кладки Причальные сооружения из массивов-гигантов Причальные сооружения из оболочек большого диаметра Причальные сооружения на ряжах Уголковые причальные сооружения Причальные сооружения типа больверк Причальные сооружения эстакадного типа Причальные сооружения мостового типа
Причальные сооружения из массивовои кладки Причальные сооружения из массивов-гигантов Причальные сооружения из оболочек большого диаметра Причальные сооружения на ряжах Уголковые причальные сооружения Причальные сооружения типа больверк Причальные сооружения эстакадного типа Причальные сооружения мостового типа
Ссылка на эту статью в различных форматах
HTMLTextBB Code
Комментарии к этой статье
Еще нет комментариев